无人驾驶汽车作为人工智能和汽车工业结合的产物,毫无疑问是当今的热门话题。当我们畅谈无人驾驶未来发展前景的同时,不妨追溯一下无人驾驶技术的发展历史:它究竟是从哪里开始的?又是如何发展的呢?本文将沿着历史的轨迹一同回顾下无人驾驶技术的成长历程。
01.1920年代——起源:“无人”驾驶
早在1925年,无线电设备公司Houdina Radio Control设计了一辆“无人”驾驶汽车American Wonder,这辆车由一辆1926 Chandler(美国汽车品牌,现已消失)改装而来,它的后座上安装了一个无线电接收设备,通过接收后车发出的无线电信号,经过信号译码,再通过一个小电动马达来操作车的方向盘、制动器、加速器等,进而控制车的运动。研发成功后这个American Wonder还在纽约市进行了展示,并穿越拥挤的交通,从百老汇开到了第五大道。
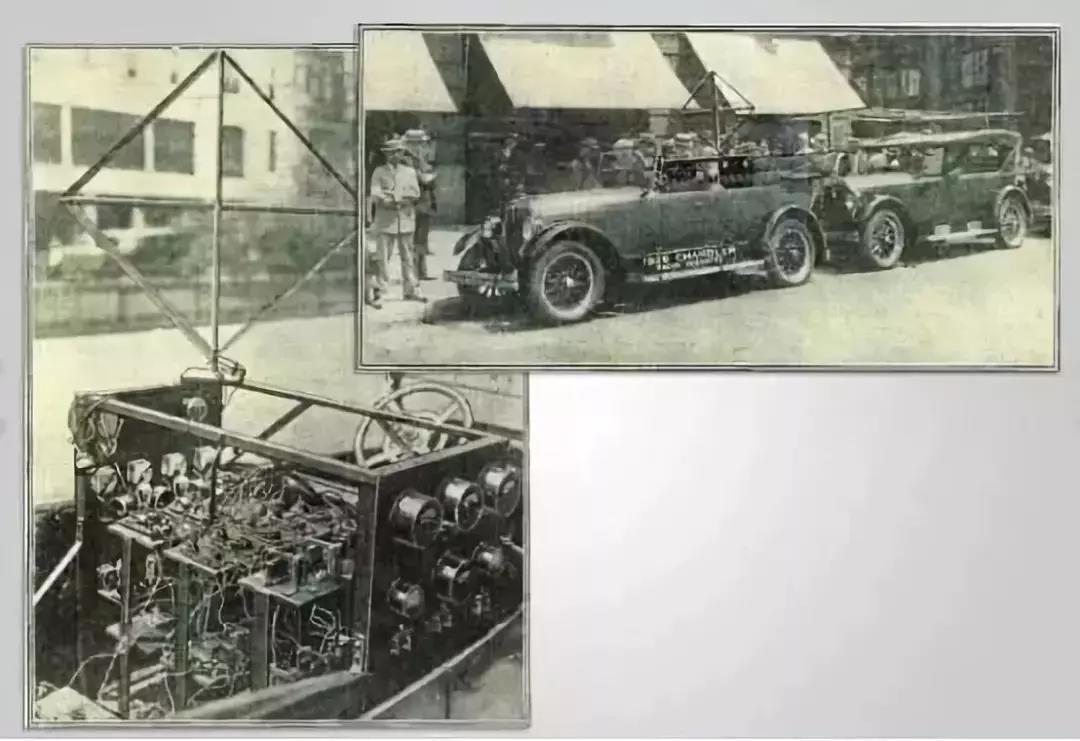
无人驾驶汽车(Driverlesscar)也叫自动驾驶汽车 (Automatic car),它是在没有人工参与的情况下具备感知环境和进行导航的汽车。其核心在于其“自主性”、“智能化”。显然American Wonder的“无人驾驶”是打了双引号的无人驾驶,其“无人”仅为“车上无人”,但是还需要人来控制,严格意义上来说它应该叫做“遥控驾驶”。虽然如此,这辆车还是在当时引起了很多人的兴趣,后来还分别于1926年在密尔沃基和1932年在弗雷德里克斯堡(Fredericksburg)做了展示。
02.1930年代——世界博览会上的畅想
1939年纽约世界博览会,由通用汽车公司赞助建造了一个名为“Futurama”(未来世界展览)的展览,工业设计师 Norman Bel Geddes向当时的人们展示了他对未来汽车及交通的想法——未来汽车采用无线电控制,使用电力驱动,由嵌在道路中的电磁场提供能量来源。

1940年Bel Geddes在他的新书“Magic Motorways”中进一步阐述了他的观点——人类应该从驾驶中脱离出来。他设计了一种高速公路及运输系统,在高速公路上采用自动驾驶,驶出高速公路后才由人手动驾驶。并且,他预测这种设想会在1960年代实现。可惜Bel Geddes先生在1958年就去世了,没能看到他的愿望在60年代并未实现,即使从60年代又过去半个多世纪过去后仍未实现。
03.1950年代——“自动高速公路”
时间回到50年代,研究人员们开始按照上述设想进行试验,1953年RCA(RadioCorporation of America 美国无线电公司)实验室成功的研制了一辆微型汽车,它由按一定模式铺设在地板里的电线进行导航和控制。

1956年,通用公司正式展出了Firebird Ⅱ概念车,这是世界上第一辆配备了汽车安全及自动导航系统的,神似火箭头的概念车。(如下图)
1958年,通过与内布拉斯加州及通用汽车公司合作,RCA实验室又成功在该州林肯市外的高速公路上进行了400英尺的真实路况、全尺寸汽车试验。
实验的成功让当时的人们很看好这种方法的前景,并且引起了许多公司的注意。例如中部电力与照明公司(Central Power and Light Company)就曾在很多报纸上刊登广告介绍介绍无人驾驶,先来看下当时的广告:有一天你和你的爱车会疾驰在一条电子超级高速公路上,它的速度和方向由嵌入公路里的电子设备自动控制。高速公路将会变得非常安全:没有拥堵、没有碰撞、没有疲劳......当时预计这一切在1975年就会发生.
50年代和60年代,通用汽车公司还陆续推出了几款试验车——Firebirds系列,它的广告是这样的:电子导航系统可以在驾驶员休息的时候让汽车飞速通过自动高速公路。
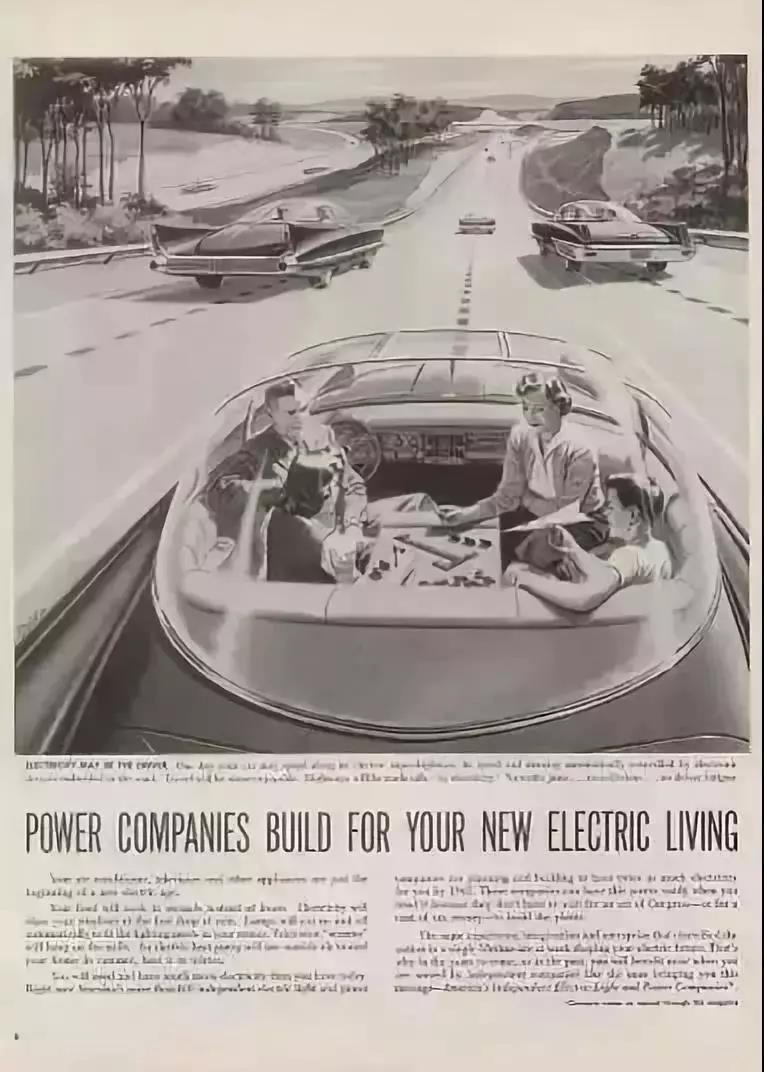
这是1956年的一则无人驾驶骑车广告,四个人在车里头打麻将,没人管汽车,也许这将是未来一家子出门时候的样子。
04.1960、70年代——新希望的出现
进入60年代,很多企业、机构也开始研发自动驾驶汽车,大部分都沿用了之前的技术,通过埋设在道路中的电子设备进行导航。俄亥俄州立大学的项目负责人Dr. Cosgriff 预言,这套系统将可以在15年内推向公共道路。英国运输与道路研究实验室使用改装的Citroen DS采用相同的方法,以130Km/h的速度在各种天气状况下进行了试验,结果汽车的速度和方向都没有发生偏离。同时根据分析,采用这个系统后,道路的负载能力将提高50%,而交通事故将减少40%。不过在70年代中期,由于研究资金撤出,试验被迫中断。虽然在道路中埋设电子设备来实现自动驾驶的方法在50年代开始进行了众多次试验,但是由于其需要对道路进行改造,添加外部设备的成本和改造难度都比较大。70年代以后这种方法逐渐消失。
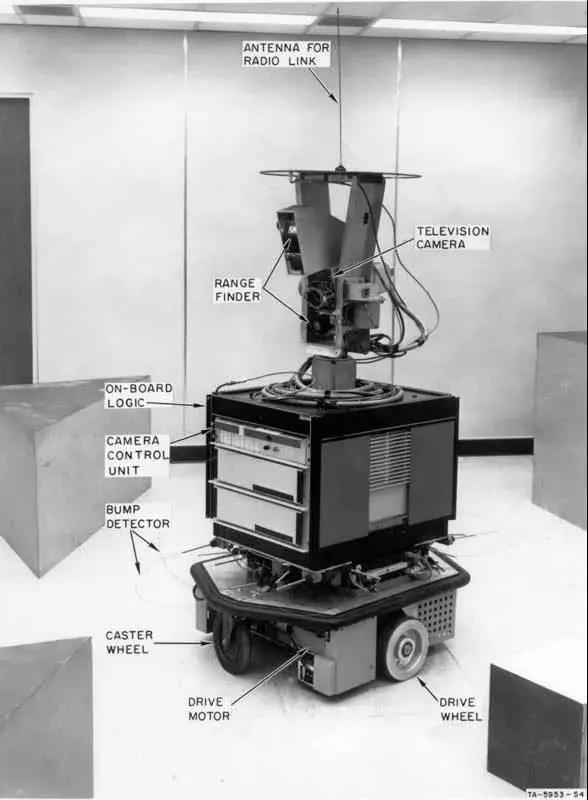
从1970年代中期开始,伊力诺依大学对智能驾驶逻辑算法展开研究。同期,1977年,日本筑波工程研究实验室开发出了第一个基于摄像头来检测导航信息的自动驾驶汽车。这辆车内配备了两个摄像头,并用模拟计算机技术进行信号处理。时速能达到30公里,但需要高架轨道的辅助。这是所知最早的开始使用视觉设备进行无人驾驶的尝试,由此翻开了无人驾驶新的一页。
05.1980年代——激励中进步
进入80年代,中国无人驾驶的技术研发正式启动,中国立项了“遥控驾驶的防核化侦察车”项目,哈尔滨工业大学、沈阳自动化研究所和国防科技大学三家单位参与了该项目的研究制造。八五期间,由北京理工大学、国防科技大学等五家单位联合研制成功了ATB-1无人车,这是中国第一辆能够自主行驶的测试样车,其行驶速度可以达到21公里/小时。ATB-1的诞生标志着中国无人驾驶行业正式起步并进入探索期,无人驾驶的技术研发正式启动。
此时基于视觉的的无人车导航开始流行。80年代初,慕尼黑联邦国防军大学(BundeswehrUniversity Munich)的Ernst Dickmanns带领他的团队以一辆奔驰汽车为基础,研制了一辆采用视觉导航的自动驾驶汽车,这辆车在交通顺畅的情况下达到了63Km/h的速度。随后EUREKA公布了普罗米修斯计划,投入7.5亿欧元用于自动驾驶汽车的研发,在EUREKA项目的资助下,成功的开发出了多辆自动驾驶汽车原型。同一时期,美国DARPA建立了ALV计划,与卡内基梅隆大学、斯坦福大学等机构合作,利用激光雷达、计算机视觉第一次实现了机器人自主控制下的自动驾驶,并在无人车上首次使用了便携式计算设备,速度达到了31Km/h。
1987年HRL实验室展示了第一款在越野环境下基于传感器的自主导航的ALV,在乱石、山坡、沟壑等地形成功以3.1Km/h的速度行驶了超过600多米。
1989年,卡内基梅隆大学率先使用神经网络来引导控制自动驾驶汽车,由此发展形成了现代控制策略的基础。
06.1990年代——探索中前进
1993~1994年,Ernst Dickmanns团队成功改装了一辆奔驰S500轿车,而且为了实时监测道路周围的环境和反应,他们还为这辆车配备了摄像头和多种传感器。当时,这辆奔驰S500成功的在普通交通环境下自动驾驶了超过1000公里的距离。
1995年卡内基梅隆大学的Navlab计划,通过在车上加装多台便携式计算设备、摄像头、GPS设备,来增强车辆的自动驾驶能力,在穿越国家的行程中,行驶了超过5000公里,据称98.2%的都是“无手”自主控制,实际上这辆车只是半自动驾驶,因为它只是使用神经网络来控制车的方向,油门和刹车仍是人控制的。卡内基•梅隆大学的研究成果对于现在的无人驾驶技术提供了非常高的借鉴意义。
1998年,ARGO项目(意大利帕尔马大学视觉实验室VisLab在EUREKA资助下完成的项目)利用立体视觉系统和计算机制定的导航路线进行了2000公里的长距离实验,其中94%路程使用自主驾驶,平均时速为90公里,最高时速123公里。
07.2000年代——加速发展期
从2004年开始DARPA(美国国防先进研究项目局)举办了3次无人车挑战赛,考验无人驾驶在恶劣和复杂环境下的能力,同时对获奖者提供巨额奖励。前两次比赛都是在沙漠中进行,比赛规则要求参赛的机器人只能依靠GPS来引导行驶,并依靠传感器或摄像头来绕开天然障碍物,从而通过230公里长的纯天然沙漠地带。
第一届没有队伍完成任务,第二届比赛斯坦福大学取得了冠军,那辆车配备了摄像头、激光测距仪、雷达远程测距、GPS还配有英特尔奔腾M处理器。第三届比赛改为在城市中进行,卡内基梅隆大学、斯坦福大学、佐治亚理工大学夺得前三名,不过第三届比赛结束之后,该项赛事没有再次举行。但是比赛中最先采用的一些设备与技术后来也被推广,有些也成为必备配置,如激光测距仪,雷达测距等。
2005年斯坦福大学一辆改装的大众途锐也完美地进行了挑战。这辆车不仅携带了摄像头,同时还配备了激光测距仪、雷达远程视距离、GPS传感器以及英特尔奔腾M处理器。
2009年,首届中国“智能车未来挑战赛”在西安举行,湖南大学、西安交通大学、上海交通大学、北京理工大学、清华大学、意大利帕尔玛大学等国内外7所大学的无人驾驶车辆同台竞技,展示了当前我国智能车最前沿的科技魅力。
2009年谷歌在DARPA的支持下,开始了自己的无人驾驶汽车项目。谷歌在DARPA的支持下,开始了自己的无人驾驶汽车项目。谷歌通过一辆改装的丰田普锐斯的太平洋沿岸行驶了1.4万英里,历时一年多。许多在2005年至2007年期间工作研究的DARPA工程师都加入到谷歌的团队,并且使用视频系统、雷达和激光自动导航技术。
08.2010年代——不断突破继续向前
2010年VIsLab团队(就是当年的ARGO项目团队)开启了自动驾驶汽车的洲际行驶,四辆自动驾驶汽车从意大利帕尔马出发,穿越9个国家,最后成功到达了中国上海。整个期间VisLab团队面对了超过1.3万公里的日常驾驶环境挑战。
2011年7月14日,红旗HQ3首次完成了从长沙到武汉286公里的高速全程无人驾驶试验,实测全程自主驾驶平均时速87公里,创造了中国自主研制的无人车在复杂交通状况下自主驾驶的新纪录。这标志着中国无人车在复杂环境识别、智能行为决策和控制等方面实现了新的技术突破。
2013年奥迪、宝马、福特、日产和沃尔沃等传统整车厂入局,在未来5-10年内开发自动驾驶汽车。
2014年谷歌对外发布了“完全自主设计”的无人驾驶汽车。
2015年谷歌第一辆原型汽车正式亮相,并且可以正式上路测试。
2015年梅塞德斯奔驰发布超现实F015概念无人驾驶汽车。
2015年12月,百度对外宣布其无人驾驶车已在国内首次实现城市、环路及高速道路混合路况下的全自动驾驶。测试时最高速度达到100公里/小时。
2016年3月28日美国通用汽车宣布,以10亿美金收购硅谷的一家研发无人驾驶技术的初创公司Cruise Automation。
2016年4月17日,长安汽车宣布完成2000KM超级无人驾驶测试项目。长安汽车此次长距离无人驾驶测试总里程超过2000KM,在历史近6天,途径四川、陕西、河南、河北等全国多个省市及地区后,最终抵达北京。
2016年4月24日,Drive.ai获准在加州测试无人驾驶汽车,采用深度学习技术。
2016年5月7日,全球第一个无人驾驶命案发生。一位特斯拉Model S的车主激活了自动驾驶辅助系统,在车祸中死亡。
2016年6月首个中国国家智能网联汽车试点示范区成立;6月7日,由工信部批准的国内首个“国家智能网联汽车(上海)试点示范区”封闭测试区正式开园运营。
2016年8月uber与沃尔沃宣布联合研发无人驾驶,将共同投资3亿美元到自动驾驶。
2016年8月24日,全球两大汽车零部件供应商Delphi和Mobileye宣布,联合投入数亿美元开发无人驾驶技术,搭载该系统的汽车有望在2021年或在2022年上市。
2016年8月25日新加坡的nuTonomy公司的无人驾驶出租车在本土正式投入使用。
2016年9月14日uber 推出无人驾驶载客服务,在美国宾夕法尼亚州匹兹堡市上路试运行。
2016年9月20日美国交通部颁布全球第一份自动驾驶官方政策《无人驾驶汽车车联邦政策》。
2016年12月14日Alphabet在洛杉矶宣布谷歌无人驾驶项目作为独立个体存在。Waymo作为新部门走上台前。
2017年1月 Waymo宣称能将激光雷达的价格降至7500美元。
2017年3月13日英特尔以153亿美元收购Mobileye.。
2017年5月1日韩国土地部宣布批准三星电子在公开道路测试无人驾驶汽车的申请。
2017年5月12日德国联邦参议院出台相关法案,允许自动驾驶汽车上路测试,还未此设立了诸多准入规定。
2017年5月谷歌旗下的自动驾驶汽车Waymo与Lyft宣布达成战略合作,将在项目试点与产品开发上合作。
2017年5月25日瑞萨电子宣布与长城汽车合作推动包括电动汽车(EV)和插电式混合动力汽车(PHV)的先进的新能源汽车以及自动驾驶汽车在中国的发展。
2017年6月27日谷歌自动驾驶汽车部门Waymo和Avisa签署了合作协议,Avis将为谷歌的自动驾驶汽车提供支持和维护服务。
2017年7月5日百度AI开发者大会在北京召开,李彦宏正坐在在一辆百度和博世一起开发的,基于Apollo技术的自动驾驶汽车,上五环。并收到一张罚单。
2017年7月11日奥迪在西班牙巴塞罗那举行的奥迪峰会上发布了公司2018年旗舰车型-A8,号称这是首款专为高度自动驾驶而开发的量产型汽车。
2017年7月18日百度与微软宣布,计划联手进行自动驾驶的全球技术开发与推广。
2017年8月8日英特尔宣布已经完成对Mobileye84%股权的收购,计划将在今年8月底完成剩余股份的收购。
2017年8月10日英特尔、丰田、爱立信宣布成立一个集团,该集团将构建一套用于自动驾驶汽车以及相关技术领域的“大数据”生态系统。
2017年8月自动驾驶技术研发公司Torc Robotics宣布与车机芯片领域巨头NXP达成合作,共同进行自动驾驶系统的技术研发。
2017年8月29日百度和江淮汽车首次对外透露清晰的合作规划,双发将于2019年推出自动驾驶量产车型,这也成为百度发布Apollo开放平台以来,其自动驾驶解决方案首批量产落地的里程碑式事件。
2017年9月1日高通推出了全新C-V2X芯片组和参考设计,使汽车制造商能够更加紧密地部署完全自动驾驶车辆所需的通信系统。
2017年10月12日黑莓旗下QNX部门主导开发的一辆自动驾驶汽车在渥太华市启动了上路测试仪式,这是加拿大国内第一辆自动驾驶汽车。
2017年10月12日美国加州车辆管理局正式宣布,从明年开始允许没有方向盘、没有制动踏板、没有后视镜和没有驾驶员的无人驾驶汽车在道路进行测试。
2017年10月18日自动驾驶创业公司Voyage联合创始人发布了一段苹果公司测试版自动驾驶汽车的短视频。视频显示,苹果自动驾驶测试汽车顶部配备了一套传感器和自动化硬件。
2017年12月7日无人驾驶技术公司Nutonomy在波士顿的无人驾驶合作试点,目前在波士顿的部分地区将乘客匹配至无人驾驶汽车。
当然,无人驾驶技术的发展还在不断演进和发展······
有机构预测,由于技术的进步,2038年无人驾驶技术将达到L4(完全自动化)/L5(汽车的智能化)级。截至2030年,美国、欧洲、中国三个地区的无人驾驶新车销量将达8200万辆。从2025年开始,电动车将迅速发展。预测2030年开始,市场将对内燃机汽车做出限制,欧美中三地区的电动新车销量将达4400万辆。
2025年,美国、欧洲和中国的联网汽车将达到4.7亿辆,而2030年无人驾驶4/5级的汽车也将达到8000万辆左右。2027-2028年,5级无人驾驶汽车将开始成为市场主流,而到了2029至2029年,该层级的无人驾驶汽车将全线成为主流。
当然,一切只是预测,由于法律环境、基础设施环境、技术验证及5G等通讯技术等原因,业内预计自动驾驶汽车的成熟发展需要很多时间的。然而,一旦实现真正意义上的自动驾驶,整个汽车产业格局都将动摇,首当其冲的就是对出行服务的影响,低成本出行服务和高效车辆调配将成为可能。
当“无人驾驶时代”来临时,出行服务的变化将推动汽车行业的变革,并促使产业链发生根本性改变,产业竞争格局也将发生变化。汽车企业转型势在必行,而汽车行业的“淘汰赛”也将随之开始,产业价值链更将重新洗牌。